Машины, выполняют какую – либо полезную работу. Это основной признак машины. Машины и их основные элементы
21-22-23
Сущность метода сечений
| Рис. 2.4 |
| При растяжении: |
| Ширина бруса меняется на |
| При сжатии: |
| (укорочение) |
| |
| |
 |
Детали машин -
Иметь представление:
Знать:
Уметь:
Назначение мех. Передач
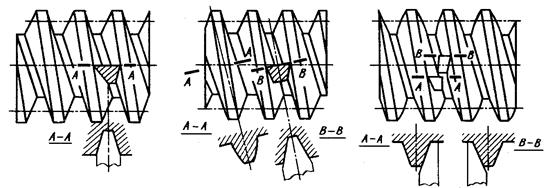
Червяные передачи
Червячные передачи применяют для передачи вращательного движения между валами, у которых угол скрещивания осей обычно составляет 0 = 90°. В большинстве случаев ведущим является червяк, т. е. короткий винт с трапецеидальной или близкой к ней резьбой.
Для облегания тела червяка венец червячного колеса имеет зубья дугообразной формы, что увеличивает длину контактных линий в зоне зацепления.
Червячная передача - это зубчато-винтовая передача, движение в которой осуществляется по принципу винтовой пары. Область применения червячных передач.
Червячные передачи применяют при небольших и средних мощностях, обычно не превышающих 100 кВт. Применение передач при больших мощностях неэкономично из-за сравнительно низкого к.п.д. и требует специальных мер для охлаждения передачи во избежание сильного нагрева. Червячные передачи широко применяют в подъемно-транспортных машинах, троллейбусах и особенно там, где требуется высокая кинематическая точность (делительные устройства станков, механизмы наводки и т. д.). Червячные передачи во избежание их перегрева предпочтительно использовать в приводах периодического (а не непрерывного) действия.
Достоинства червячной передачи.
1) Плавность и бесшумность работы.
2) Компактность и сравнительно небольшая масса конструкции.
3) Возможность большого редуцирования, т. е. получения больших передаточных чисел (в отдельных случаях в не силовых передачах до 1000).
4) Возможность получения самотормозящей передачи, т. е. допускающей передачу движения только от червяка к колесу. Самоторможение червячной передачи позволяет выполнить механизм без тормозного устройства, препятствующего обратному вращению колеса.
5) Высокая кинематическая точность.
Недостатки червячной передачи.
1) Сравнительно низкий к.п.д. вследствие скольжения витков червяка по зубьям колеса.
2) Значительное выделение теплоты в зоне зацепления червяка с колесом.
3) Необходимость применения для венцов червячных колес дефицитных антифрикционных материалов.
4) Повышенное изнашивание и склонность к заеданию.
По расположению червяка относительно червячного колеса различают передачи с верхним, нижним и боковым расположением червяка. Передачи с нижним расположением червяка работают в лучших условиях смазки, так как червяк погружен в масло, но выше потери энергии из-за гидродинамического сопротивления масла.
По форме профиля витков – архимедовы, конволютные, эвольвентные, нелинейчатые.
 |
Реечная зубчатая передача
Передача и преобразование вращательного движения в поступательное и наоборот осуществляется цилиндрическим колесом 1 и рейкой 2 (рис. 1).
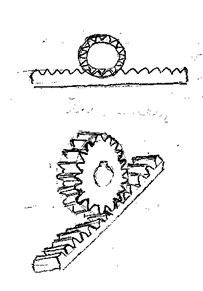
Рис. 1. Реечная зубчатая передача
Достоинства реечной зубчатой передачи: надежность, компактность, долговечность, небольшие нагрузки на валы и подшипники, постоянство передаточного отношения из-за отсутствия проскальзывания.
Недостатки : высокие требования к точности изготовления, шум при больших скоростях, жесткость. Применяют в широком диапазоне областей и условий работы – от часов и приборов до самых тяжелых машин.
21-22-23
Сущность метода сечений
Для расчетов элементов конструкции на прочность необходимо знать внутренние силы упругости, возникающие в результате приложения внешних сил в разных точках и частях конструкции.
Способы определения этих внутренних сил с помощью науки сопротивление материалов включают такой прием, как метод сечений.
Метод сечений заключается в том, что тело мысленно рассекается плоскостью на две части, любая из которых отбрасывается и взамен ее к сечению оставшейся части прикладываются внутренние силы, действовавшие на нее до разреза со стороны отброшенной части. Оставленная часть рассматривается как самостоятельное тело, находящееся в равновесии под действием приложенных к сечению внешних и внутренних сил (третий закон Ньютона – действие равно противодействию).
Метод сечений в сопромате При применении этого метода выгоднее отбрасывать ту часть элемента конструкции (тела), для которой проще составить уравнение равновесия. Таким образом, появляется возможность определить внутренние силовые факторы в сечении, благодаря которым оставшаяся часть тела находится в равновесии (прием, часто применяемый в Статике).
Применяя к оставленной части тела условия равновесия, невозможно найти закон распределения внутренних сил по сечению, но можно определить статические эквиваленты этих сил (равнодействующие силовые факторы).
Так как основным расчетным объектом в сопротивлении материалов является брус, рассмотрим, какие статические эквиваленты внутренних сил проявляются в поперечном сечении бруса.
Рассечем брус (рис. 1) поперечным сечением а-а и рассмотрим равновесие его левой части.
Если внешние силы, действующие на брус, лежат в одной плоскости, то в общем случае статическим эквивалентом внутренних сил, действующих в сечении а-а, будут главный вектор Fгл, приложенный в центре тяжести сечения, и главный момент Мгл = Ми, уравновешивающие плоскую систему внешних сил, приложенных к оставленной части бруса.
Разложим главный вектор на составляющую N, направленную вдоль оси бруса, и составляющую Q, перпендикулярную этой оси и лежащую в плоскости сечения. Эти составляющие главного вектора и главный момент называют внутренними силовыми факторами, действующими в сечении бруса. Составляющую N называют продольной силой, составляющую Q – поперечной силой, пару сил с моментом Ми – изгибающим моментом.
Основная задача сопротивления материалов находить внутренние силы упругости(силы межмолекулярного взаимодействия). Это силы, возникающие в теле при изменении его формы и уравновешивающие действие внешних сил. Определяются методом сечений. В конструкции проводиться сечение, разбивая её на две части. Часть конструкции, на которую действует больше нагрузок отбрасывают. Часть конструкции, на которую действует меньше внешних нагрузок оставляют и рассматривают её равновесие, добавив внутренние силы упругости (которые являются силами межмолекулярного взаимодействия между первой и второй частями конструкции). Внутренние силы упругости вычисляют исходя из условия равновесия для пространственной системы сил, которое состоит из шести уравнений равновесия (сумма проекций моментов на оси декартовой системы координат и сумма проекций действующих сил на координатные оси).
При растяжении (сжатин) бруса в его поперечных сечениях возникают только нормальные напряжения. Равнодействующая соответствующих элементарных сил о, dA - продольная сила N - может быть найдена с помощью метода сечений. Для того чтобы иметь возможность определить нормальные напряжения при известном значении продольной силы, необходимо установить закон нх распределения по поперечному сечению бруса.
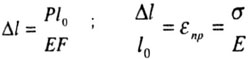
| ДЕФОРМАЦИИ И ПЕРЕМЕЩЕНИЯ ПРИ РАСТЯЖЕНИИ - СЖАТИИ |
| При растяжении и сжатии бруса меняются его продольные и поперечные размеры (рис.2.4). |
| Рис. 2.4 |
| При растяжении: |
| Длина бруса меняется на (удлинение), |
| Ширина бруса меняется на |
| При сжатии: |
| (укорочение) |
| |
| Закон Гука выражает прямо пропорциональную зависимость между нормальным напряжением и относительной деформацией: |
| |
| или, если представить в другом виде: |
| |
| где Е - модуль продольной упругости. |
| Это физическая постоянная материапа, характеризующая его способность сопротивпяться упругому деформированию. |
| EF - жесткость поперечного сечения бруса при эастяжении-сжатии. |
| Деформация бруса (растяжение ипи сжатие) вызывает перемещение поперечных сечений. |
Задачи предмета детали машин -
Детали машин -
прикладная научная дисциплина, изучающая общеинженерные методы проектирования (расчета и конструирования) элементов машин и механизмов.
Изучение машин и их проектирование базируется на известных фундаментальных законах природы.
Курс «Детали машин и основы конструирования» является завершающим в общеинженерной подготовке курсантов высших общевойсковых и танковых командных институтов.
Цель курса - создать теоретическую базу для последующего изучения конструкции многоцелевых гусеничных и колесных машин (МГКМ), их эксплуатации и ремонта с учетом критериев работоспособности, надежности и технологичности.
Задача курса - изучение типовых конструкций элементов механизмов общепромышленного и военного применения, основных принципов их работы и методов проектирования, включая расчет параметров и конструктивные особенности. В результате изучения дисциплины курсанты должны:
Иметь представление:
о принципах проектирования деталей и узлов боевых машин и автомобилей;
о влиянии материалов и технологичности конструкций на эффективность и эксплуатационные качества БМП и БТР.
Знать:
характерные виды разрушения и основные критерии работоспособности узлов и агрегатов БМП и БТР.
Уметь:
производить оценку работоспособности механизмов бронетанкового вооружения, выполнять расчеты при проектировании типовых деталей и узлов ВВТ;
оценивать достоинства и недостатки конструкции узлов и агрегатов боевых машин;
конструировать узлы и агрегаты боевых машин.
Внимательный анализ состава самых различных машин (транспортных, военных, сельскохозяйственных, технологических и т.п.) показывает, что все они включают значительное количество однотипных деталей узлов и механизмов. По этой причине курс деталей машин посвящен изучению наиболее общих элементов машин, способов их расчета и конструирования. Это, в свою очередь, обусловливает важность данного курса не только в свете прикладного применения, но также и с точки зрения развития технической культуры будущего офицера, поскольку техническая культура - это одна из многочисленных граней общечеловеческой культуры.
Что называется машиной. Какие признаки характеризуют машину
Машиной называется устройство, создаваемое человеком, выполняющее механические движения для преобразования энергии, материалов и информации с целью полной замены или облегчения физического и умственного труда человека, увеличения его производительности.Под материалами понимаются обрабатываемые предметы, перемещаемые грузы и т. д.
Машину характеризуют следующие признаки:
преобразование энергии в механическую работу или преобразование механической работы в другой вид энергии;
определённость движения всех ее частей при заданном движении одной части;
искусственность происхождения в результате труда человека.
Назначение мех. Передач
Сначала человек изобрел простые механизмы для облегчения своего труда. Пользуясь этими несложными орудиями, он по-стоянно их совершенствовал. Так появились сложные механиз-мы, а со временем и машины .
Пылесос и холодильник, самолет и подъемный кран, ткацкий станок и комбайн, велосипед и автомобиль — все это примеры машин . Обратите внимание на то, что, несмотря на различия во внешнем виде и назначении, в материалах, из которых они сде-ланы, их общее название — машины. Почему? Во-первых, по тому, что все они выполняют необходимую человеку работу. Во-вторых, для ее выполнения всем машинам необходима энер-гия. И в-третьих, общим для всех машин является наличие трех основных частей: рабочего органа, двигателя и связыва-ющего их механизма (рис . 116). При отсутствии одной из час-тей машина не будет работать. Таким образом, машина — это система, составные части которой взаимосвязаны. А поскольку машины создает человек, то их можно назвать рукотворными системами.
Рабочие органы машины могут быть разными. У вертолета — пропеллер, у экскаватора — ковш, у велосипеда — колеса. Назва-ние рабочий орган свидетельствует о том, что эта часть помо-гает человеку выполнять ту работу, ради которой машину соз-дали.
Назначение двигателя — превращать один вид энергии в дру-гой. В двигателях таких машин, как автомобиль, мотоцикл, трактор, химическая энергия топлива превращается в тепло-вую, а потом в механическую.
Двигатели пылесоса, стиральной машины превращают элект-рическую энергию, поступающую к ним из электросети, в меха-ническую. Все двигатели, в том числе и электродвигатели, во время работы нагреваются. Это значит, что часть полученной энергии превращается еще в тепловую.
У велосипеда или ручной мясорубки двигателя нет. Почему же их также называют машинами? Потому что роль двигателя у них выполняет человек, расходуя при этом свою энергию.
Рабочий орган и двигатель соединены между собой механиз-мом . У многих машин — это простые механизмы (рычаг, блок, цепь, ремень) или их сочетание. Например, механизм велосипе-да является сочетанием таких простых механизмов, как рычаг, ось, зубчатое колесо (шестерня), цепь (рис. 117). Материал с сайта
Машины — это устройства, выполняющие полезную для человека работу и при этом превращающие один вид энергии в другой.
Основными частями каждой машины является рабочий орган, двигатель, механизм
Мы живем в мире машин. Они окружают нас дома, на улице и на работе. Их гул слышен на земле и под землей, на воде и под водой. Они подняли человека в небо и открыли путь в космические дали.
От разнообразия, технического совершенства и количества машин зависят условия и производительность труда человека, благосостояние народа, сила и мощь государства. Машиностроение - основа современной техники, одна из самых важных отраслей промышленности.
Многим из вас, конечно, интересно узнать, как делают машины. Но прежде чем познакомиться с машиностроением, давайте ответим на вопросы: а что такое машина? Почему столько устройств, различных по назначению, конструкции и размерам, называют одним универсальным словом-машина? Да потому, что их объединяет одно общее свойство: все они выполняют какую-либо полезную работу. Это основной признак машины.
Возьмем для примера две бритвы - электрическую и безопасную. Назначение у них одинаковое - резать волосы. Но электрическая бритва - машина. Она сама выполняет основную рабочую операцию -сама режет волосы. Человек только управляет ею. А вот безопасная бритва не машина, а всего лишь инструмент - простейшее орудие, с помощью которого человек сам совершает работу.
Еще пример. Обычная лопата - это инструмент, при помощи которого человек копает землю. Экскаватор служит для этой же цели. Но вы без колебаний назовете экскаватор машиной. И не ошибетесь, потому что экскаватор сам совершает полезную рабочую операцию, а человек только управляет им.
Значит, главное отличие машины от других устройств заключается в том, что машина сама совершает основные рабочие операции, в то время как орудия только помогают человеку совершать работу.
Машины могут быть самыми разными, в зависимости от того, какую работу они выполняют: транспортными (самолет и вертолет, электровоз и теплоход, автомобиль и велосипед), энергетическими (турбина и двигатель внутреннего сгорания, электродвигатель и электрогенератор), машинами-орудиями, или технологическими (подъемный кран и сеялка, металлообрабатывающий станок и печатная машина), счетно-решающими (от простого арифмометра до современных электронных вычислительных машин).
У каждой машины есть 3 основные части: двигатель а, передаточный механизмб, рабочий орган в.
Но как бы машины ни отличались друг от друга, опытный глаз инженера всегда найдет в них общие черты. Возьмем, например, настольный вентилятор, гигантский шагающий экскаватор и автомобиль. Прежде всего у каждого из них есть рабочий (исполнительный) орган, при помощи которого они выполняют полезную работу. У вентилятора рабочий орган - это небольшой пропеллер, у экскаватора -гигантский ковш, у автомобиля - колеса.
Рабочие органы нужно приводить в движение,-значит, у машины должны быть двигатели. У вентилятора в корпусе спрятан маленький электрический двигатель, колеса автомобиля вращает двигатель внутреннего сгорания, а у шагающего экскаватора более 40 электродвигателей. У других машин в качестве двигателя может быть паровая машина или газовая турбина - от этого суть не меняется.
Движение от двигателя передается рабочим органам машины с помощью передаточных устройств (передаточных механизмов). Это может быть канатно-рычажный механизм, как у экскаватора, или коробки передач, как у автомобиля.
Вот мы и установили, что машина состоит из трех основных частей: рабочего органа, двигателя и передаточного механизма. Правда, у некоторых машин, например у обычного велосипеда двигателя нет, он приводится в движение человеком. Но от этого велосипед не перестает быть машиной.
Габотой каждой машины надо управлять. Значит, у нее должны быть еще устройства управления: рычаги, штурвалы, педали, кнопки. Кроме того, машины могут иметь автоматические программные устройства, в этом случае человеку не приходится непосредственно управлять ими, он только составляет для них программу и следит за их работой. Такие машины называются автоматами.
И наконец, каждая машина должна иметь какой-то остов, раму или станину, на которых крепятся все ее устройства.
Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Существуют следующие виды машин:
1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
Двигатели (рис.1.2), которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности:
Транспортные машины (рис.1.4), которые используют механическую энергию для изменения положения объекта (его координат).
3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на:
Математические машины (рис.1.6), преобразующие входную информацию в математическую модель исследуемого объекта.
4. Кибернетические машины (рис.1.8) - машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т.е. машины обладающие элементами искусственного интеллекта).
| Рис.1.8 |
Понятие о машинном агрегате.
Машинным агрегатом называется техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Обычно в состав машинного агрегата входят: двигатель, передаточный механизм и рабочая или энергетическая машина. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая или кибернетическая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Схема машинного агрегата.
 |
|
| Рис.1.9 |
Механизм и его элементы.
В учебной литературе используются несколько определений механизма:
Первое: Механизмом называется система твердых тел, предназначенная для передачи и преобразования заданного движения одного или нескольких тел в требуемые движения других твердых тел .
Второе: Механизм - кинематическая цепь, в состав которой входит неподвижное звено (стойка) и число степеней свободы которой равно числу обобщенных координат, характеризующих положение цепи относительно стойки .
Третье: Механизмом называется устройство для передачи и преобразования движений и энергий любого рода .
Четвертое: Механизм - система твердых тел, подвижно связанных путем соприкосновения и движущихся определенным, требуемым образом относительно одного из них, принятого за неподвижное .
В этих определениях использованы раннее не определенные понятия:
Звено - твердое тело или система жестко связанных тел, входящих в состав механизма. Кинематическая цепь - система звеньев, образующих между собой кинематические пары. Кинематическая пара - подвижное соединение двух звеньев, допускающее их определенное относительное движение. Стойка - звено, которое при исследовании механизма принимается за неподвижное. Число степенейсвободы или подвижность механизма - число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве.
Из теоретической механики: Системы материальных тел (точек), положения и движения которых подчинены некоторым геометрическим или кинематическим ограничениям, заданным наперед и не зависящим от начальных условий и заданных сил, называется несвободной. Эти ограничения наложенные на систему и делающие ее несвободной называются связями . Положения точек системы допускаемые наложенными на нее связями называются возможными. Независимые друг от друга величины q 1 ,q 2 , ... q n , вполне и однозначно определяющие возможные положения системы в произвольный момент времени называются обобщенными координатами системы.
Недостатками этих определений являются: первое не отражает способности механизма преобразовывать не только движение, но и силы; второе не содержит указания выполняемой механизмом функции. Оба определения входят в противоречия с определением технической системы. Учитывая сказанное, дадим следующую формулировку понятия механизм:
Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Здесь: входные звенья - звенья, которым сообщается заданное движение и соответствующие силовые факторы (силы или моменты); выходные звенья - те, на которых получают требуемое движение и силы.
Начальное звено - звено, координата которого принята за обобщенную. Начальная кинематическая пара - пара, относительное положение звеньев в которой принято за обобщенную координату.
Классификация механизмов.
Механизмы классифицируются по следующим признакам:
- По области применения и функциональному назначению:
- механизмы летательных аппаратов;
- механизмы станков;
- механизмы кузнечных машин и прессов;
- механизмы двигателей внутреннего сгорания;
- механизмы промышленных роботов (манипулятороы);
- механизмы компрессоров;
- механизмы насосов и т.д.
- с постоянной передаточной функцией;
- с переменной передаточной функцией:
- с нерегулируемой (синусные, тангенсные);
- с регулируемой:
- со ступенчатым регулированием (коробки передач);
- с бесступенчатым регулированием (вариаторы).
- вращательное во вращательное:
- редукторы w вх > w вых ;
- мультипликаторы w вх < w вых ;
- муфты w вх = w вых ;
- вращательное в поступательное;
- поступательное во вращательное;
- поступательное в поступательное.
- пространственные;
- плоские;
- сферические.
Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой-либо одной сфере, являются одновременно и сферическими.
 |
|
| Рис.1.10 |
- по изменяемости структуры механизма на механизмы:
- с неизменяемой структурой;
- с изменяемой структурой.
В процессе работы кривошипно-ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться. Так если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь-стойка.
- по числу подвижностей механизма:
- с одной подвижностью W=1 ;
- с несколькими подвижностями W>1:
- суммирующие (интегральные);
- разделяющие (дифференциальные).
 |
| Рис.1.13 |
- по виду кинематических пар (КП):
- с низшими КП (все КП механизма низшие);
- с высшими КП (хотя бы одна КП высшая);
- шарнирные (все КП механизма вращательные - шарниры).
- фрикционные (сцепления);
- зацеплением;
- волновые (создание волновой деформации);
- импульсные.
- рычажные (рис.1.14);
- зубчатые (рис.1.15);
- кулачковые (рис. 1.16);
- планетарные (рис. 1.17);
- манипуляторы (рис.1.11-1.12).
 |  |
| Рис.1.14 | Рис.1.15 |
 |  |
| Рис.1.16 | Рис.1.17 |
Контрольные вопросы к лекции 1.
1. Что является целью курса ТММ, какие задачи решаются в курсе ТММ? (стр.1)
2. Какие основные разделы содержит курс ТММ? (стр. 3)
3. Какие этапы прошло ТММ в своем историческом развитии? (стр.2-3)
4. Какие свойства механизмов изучаются в курсе ТММ, в чем отличие предмета ТММ от специальных дисциплин? (стр.2)
5. Что называется "проектом" и "инженерным проектированием" ? (стр.3)
6. Перечислите основные этапы процесса проектирования? (стр.4-5)
7. Дайте определения понятий "техническая система" и "структура" ? (стр. 5-6)
8. Что называется "машиной", какие виды машин Вы знаете? (стр.6-7)
9. Какое техническое устройство называется "машинным агрегатом", назовите основные элементы машинного агрегата? (стр.8)
10. Дайте определения понятий "звено" и "кинематическая пара" ? (стр.9)
11. Какая техническая система называется механизмом? (стр.9)
12. Перечислите признаки по которым классифицируются механизмы
Список дополнительной литературы к Лекции 1.
- П.Хилл Наука и искусство проектирования. Методы проектирования, научное обоснование решений. Пер. с англ., Под ред. Венды В.Ф., М.: Мир, 1973.
- Альтшуллер Г.С. Алгоритм изобретения. М.: Московский рабочий, 1973.
- Джонс Дж. К. Методы проектирования. / Пер. с англ. 2-е изд. М.: Мир. 1986.
- Дитрих Я. Проектирование и конструирование: Системный подход. Пер. с польск. - М.: Мир, 1981.
- Конструирование приборов. В 2-х книгах. / Под ред. В.Краузе. - М.: Машиностроение. 1987.
- Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение. 1981.
- Р.Бейер Кинематический синтез механизмов: Основы теории метрического синтеза плоских механизмов. / Пер. с нем. М.: Машгиз. 1959.
- Теория механизмов и механика машин. Под ред. К.В.Фролова. М.: Высшая школа, 1998.
Структура механизмов.
Краткое содержание: Классификация кинематических пар. Модели машин. Методы исследования механизмов. Понятие о структурном анализе и синтезе. Основные структурные формулы. Структурная классификация механизмов по Ассуру и по Артоболевскому. Структурный анализ механизма. Подвижности и связи в механизме. Понятие об избыточных связях и местных подвижностях. Рациональная структура механизма. Методы определения и устранения избыточных связей и местных подвижностей.
Физические величины и единицы измерений,
используемые в механике
|
Физическая величина |
Единица измерений |
||
|
Наименование |
Обозначение |
Наименование |
Обозначение |
|
Угол плоский Перемещение точки Скорость линейная Скорость угловая Ускорение линейное Ускорение угловое Частота вращения Плотность материала Момент инерции Момент силы Вращающий момент Кинетическая энергия Мощность |
L , l , r T , t F, P, Q, G |
Килограмм Радиан, градус Метр в секунду Радиан в секунду Метр на секунду в квадрате Радиан на секунду в квадрате Оборот в минуту Килограмм на кубический метр Килограмм-метр в квадрате Ньютон-метр Ньютон-метр |
рад/c 2 , 1/c 2 Н (кг·м/с 2) |
Лекция N 1
Введение
Теория механизмов и машин – наука, изучающая общие законы и принципы построения машин, позволяющая выполнить первый этап проектирования конструкций, сооружений, систем машин и механизмов на основе разработанных ею методов.
В ТММ изучаются свойства отдельных типовых механизмов, широко применяемых в самых различных машинах, приборах и устройствах. При этом анализ и синтез механизмов осуществляется независимо от его конкретного назначения, т.е. однотипные механизмы (рычажные, кулачковые, зубчатые…) исследуются одними и теми же приемами для двигателей, насосов, компрессоров… и для других типов машин.
Основные определения и понятия
Машиной называется техническое устройство, осуществляющее определенные механические движения, связанные с преобразованием энергии, свойств, размеров, формы или положения материалов (или объектов труда) и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Существуют следующие виды машин:
Информационная
Кибернетическая
Энергетическая
математичкская
Контрольно-управляющая
технологическая
транспортная
генератор
двигатель
Энергетической машиной называется машина, предназначенная для преобразования энергии. Если осуществляется преобразование любого вида энергии в механическую, то имеем дело смашиной-двигателем, а наоборот – машина-генератор.
Рабочая машина предназначена для преобразования материалов, причемтранспортная машина преобразует материал только путем изменения положения объекта, атехнологическая рабочая машина преобразует форму, свойства и положение материала или объекта.
Информационная машина служит для получения и преобразования информации.
Контрольно-управляющая машина преобразует информацию с целью управления энергетическими или рабочими машинами, аматематическая машина – с целью получения математических образов соответствующих свойствам объекта.
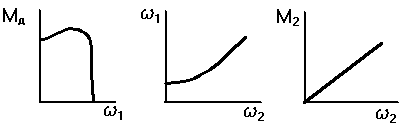
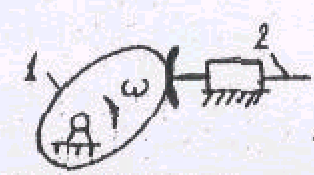
Двигатель имеет определенную механическую характеристику, рабочая машина
Механические характеристики указаны в техпаспорте.
1 – скорость, с которой вращается вал двигателя;
2 – скорость, с которой будет вращаться главный вал рабочей машины.
1 и 2 нужно поставить в соответствие друг другу.
Например, число оборотов n 1 =7000 об/мин., а n 2 =70 об/мин.
Чтобы привести в соответствие механические характеристики двигателя и рабочей машины, между ними устанавливают передаточный механизм, который имеет свои механические характеристики.
up2=1/2=700/70=10
В качестве передаточного механизма могут быть использованы:
фрикционные передачи (с использованием трения);
цепные передачи (привод мотоцикла);
зубчатые передачи.
В качестве рабочей машины наиболее часто используют рычажные механизмы.
Основные виды рычажных механизмов.
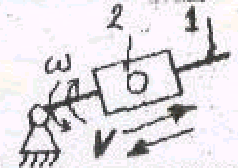
1. Кривошипно-ползунный механизм.
а) центральный (рис.1);
б) внеосный (дезоксиальный) (рис.2);
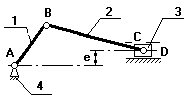
е - эксцентриситет
Рис. 2
1-кривошип, т.к. звено совершает полный оборот вокруг своей оси;
2-шатун, не связан со стойкой, совершает плоское движение;
3-ползун (поршень), совершает поступательное движение;
2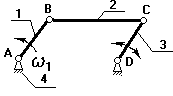 .
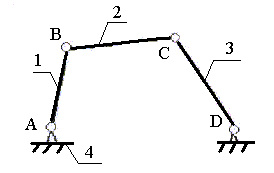
Четырехшарнирный механизм.
.
Четырехшарнирный механизм.
Звенья 1,3 могут быть кривошипами.
Если зв.1,3 – кривошипы, то механизм двукривошипный.
Если зв.1 – кривошип (совершает полный оборот), а зв.3 – коромысло (совершает неполный оборот), то механизм кривошипно-коромысловый.
Если зв.1,3 – коромысла, то механизм двукоромысловый.
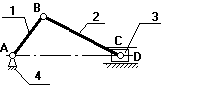
3. Кулисный механизм.
1 - кривошип;
2 - камень кулисы (втулка) вместе с зв.1 совершает полный оборот вокруг А (1и2одно и тоже), а также движется вдоль зв.3, приводя его во вращение;
3 - коромысло (кулиса).
н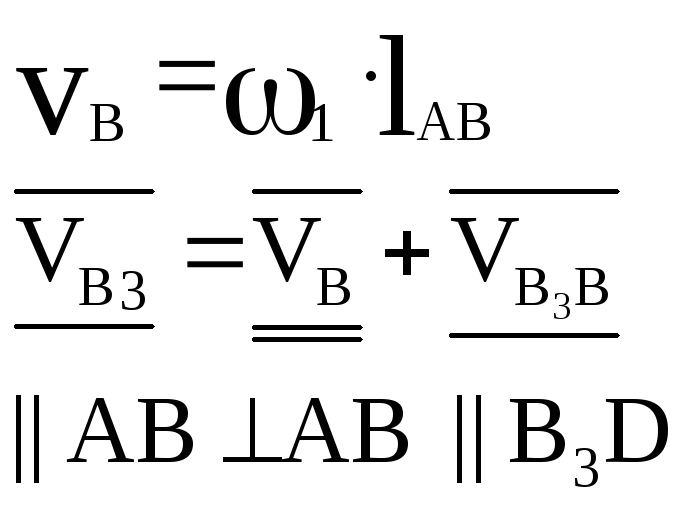 а
зв.3 выбирают точку В 3 и выбирают
в данный момент так, чтобы она совпадала
с точкой В.
а
зв.3 выбирают точку В 3 и выбирают
в данный момент так, чтобы она совпадала
с точкой В.
4.Гидроцилиндр
(в кинематическом отношении подобен кулисному механизму).
В процессе проектирования конструктор решает две задачи:
анализа (исследуетготовый механизм);
синтеза (проектируется новый механизм по требуемым параметрам);
Понятие о машинном агрегате.
Машинным агрегатом называется техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенная для выполнения каких-либо требуемых функций. Обычно в состав машинного агрегата входят: двигатель, передаточный механизм (и их может быть несколько или совсем не быть) и рабочая или энергетическая машина. В настоящее время в состав машинного агрегата часто включается контрольно-управляющая машина. Передаточный механизм в машинном агрегате необходим для согласования механических характеристик двигателя с механическими характеристиками рабочей или энергетической машины.
Схема машинного агрегата.
Передаточный механизм
Двигатель
Рабочая машина
Контрольно-управляющая машина
Механизм и его элементы.
Механизмом называется система твердых тел , объединенных геометрическими или динамическими связями,предназначенных для преобразования движения входного звена в требуемое движениевыходных звеньев.
Твердые тела, входящие в состав механизма, не является абсолютно твердыми, однако их деформации обычно весьма малы.
Главное назначение создаваемого механизма – осуществление технической операции в результате движения его элементов.
Звено – это твердое тело, входящее в состав механизма.
Звенья бывают: простые - состоят из одной детали;
сложные - состоят из нескольких жестко скрепленных друг с другом деталей и выполняющих одну и ту же функцию.
Входное звено – это звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено – звено, которое совершает движение, для выполнения которого предназначен механизм.
Звенья, соединяясь друг с другом, образуют кинематические цепи , которые разделяют на:
простые и сложные;
замкнутые и разомкнутые;
а) замкнутой , у которой звенья б)незамкнутой , звенья
образуют один или несколько которой не образуют контуров
контуров
Пример замкнутой кинематической
цепи на рис.1;
кривошип
Кинематические пары: А, В, С, D.
рис.1 Кривошипно- ползунный механизм
![]()
пример разомкнутой цепи:
Кинематическая пара – это соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Звено, относительно которого рассматривается движение остальных звеньев, считается условно – неподвижным и называется стойкой .
Несколько звеньев, связанных между собой кинематическими парами, образуют кинематическую цепь , которая может быть:
а) замкнутой; б) незамкнутой
В современном машиностроении применяются машины и механизмы с абсолютно твердыми (абсолютно жесткими), упругими (гибкими), жидкими и газообразными телами (звеньями).
К упругим звеньям относят пружины, мембраны и другие элементы, упругая деформация которых вносит существенные изменения в работу механизма. Кгибким звеньям относят ремни, цепи, канаты. Кжидким игазообразным телам относят масло, воду, газ, воздух и т.п. вещества.
Таблица 1.1
Основные виды звеньев механизмов
|
Название |
Условное изображение на схемах |
Движение |
Особенности |
|
|
|
Отсутствует | |||
|
|
Отсутствует | |||
|
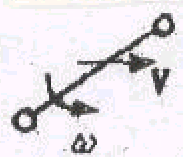
Кривошип |
|
Вращательное |
Полный оборот |
|
|
|
Нет пар, связанных со стойкой |
|||
|
Коромысло |
|
Качательное |
Неполный оборот, возвратно-вращательное движение |
|
|
|
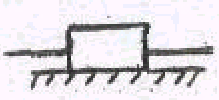
Возвратно-поступатель |
Направляющая неподвижна |



|
|
Вращательное, колебательное |
Направляющая подвижна |
||
|
|
Направляющая подвижна |
|||
|
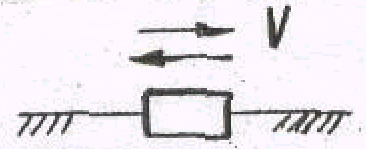
|
Возвратно-поступательное |
Направляющая подвижна |
||
|
1.Кулачок 2.Толкатель |
|
Вращательное, колебательное | ||
|
1.Кулачок 2.Толкатель |
|
Возвратно-поступательное |
Профиль определяет закон движения ведомого звена |
|
|
Зубчатое колесо |
|
Вращательное, колебательное |
Зубчатый контур |
|
|
Фрикционное колесо |
|
Вращательное, колебательное | ||
|
|
Возвратно-поступательное |
Может иметь зубчатый контур |


Контрольные вопросы к лекции N 1
Что называется машиной? Какие машины Вы знаете? Что такое машинный агрегат?
Что называется механизмом, кинематической цепью? Какие виды кинематических цепей существуют?
Какая разница между кинематической цепью и кинематической парой?
Что называют кинематической парой, как их классифицируют?
Как происходит замыкание кинематических пар в кинематической цепи?
Что называют звеном, какие виды звеньев существуют? Чем отличается деталь от звена?